Eine solche Kabellänge wird durch die Verwendung eines Lichtwellenleiters (Glasfaserkabel) ermöglicht. Das Spezialkabel zeichnet sich durch sein geringes Gewicht (20kg/1000m), hohe Zugfestigkeit (2000 N) und günstige Gleiteigenschaften aus. Dieses System wird vor allem für die Inspektion von Trinkwasserleitungen verwendet. Die 1000m-Anlage kann bei Bedarf aus dem Fahrzeug ausgebaut, und per Helikopter zum Einsatzpunkt geflogen werden.

Der Roboter
- Abmessungen: 890x135x145 mm (LxBxH)
- Gewicht: 25kg
- Einsatzbereich: DN200 bis DN1500
- CCD Farbkamera mit 10xZoom
- NiMH Akkus zur Stromversorgung
- Neigungsmessung
- Einzelradantrieb, lenkbar (bogengängig)
Die Wasserschlange
Trinkwasserleitungen ab einem Durchmesser von DN 100 bis DN 250 werden mit der sogenannten „Schleppkamera“ inspiziert. Sie besteht aus dem Kamerakopf, einem Schlauchpaket mit Akkus und der „Übersetzungs-Elektronik“, in der die Bilddaten in Lichtwellen umgesetzt werden. Die Kamera wird mit einer Art Fallschirm in die Leitung eingeblasen oder mit Wasser eingespült oder an einem Zugseil durch die Leitung gezogen. Somit steht auch für kleine Leitungsdimensionen die gewohnte Kabellänge von 1000m zur Verfügung.
Ortung
Um den Leitungsverlauf zu ermitteln, sind die Kameras mit Ortungssendern versehen. Stahlleitungen werden geortet, indem eine Funkfrequenz an die Leitung gelegt wird. Dabei übernimmt die metallische Leitung die Funktion eines Senders.
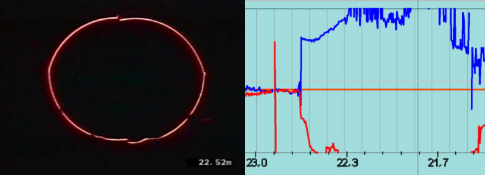
Querschnittsvermessung,
Deformationsmessung, Kalibrierung
Bei diesem Messverfahren projiziert ein Laser einen Ring auf die Rohrinnenwand. Die Bilder werden kontinuierlich über die gesamte Haltungslänge aufgezeichnet. Die Auswertungssoftware errechnet aus den digitalen Einzelbildern das Profil mit Durchmesser und Ovalität.